Studijní materiál: Aproximace přechodových charakteristik metodou prof. Strejce
Skrýt detaily | Oblíbený- Kvalita:80,0 %
- Typ:Studijní materiál
- Univerzita:Univerzita Tomáše Bati ve Zlíně
- Fakulta:Fakulta aplikované informatiky
- Kategorie:Technika
- Podkategorie:Automatizace
- Předmět:Automatizace
- Autor:snoopydogg
- Ročník:2. ročník
- Rozsah A4:4 strán
- Zobrazeno:1 722 x
- Stažené:0 x
- Velikost:0,3 MB
- Formát a přípona:PDF dokument (.pdf)
- Jazyk:český
- ID projektu:12433
- Poslední úprava:01.08.2018
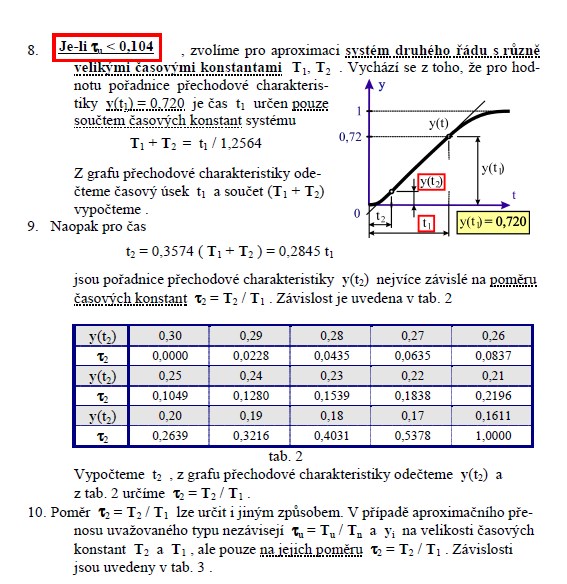
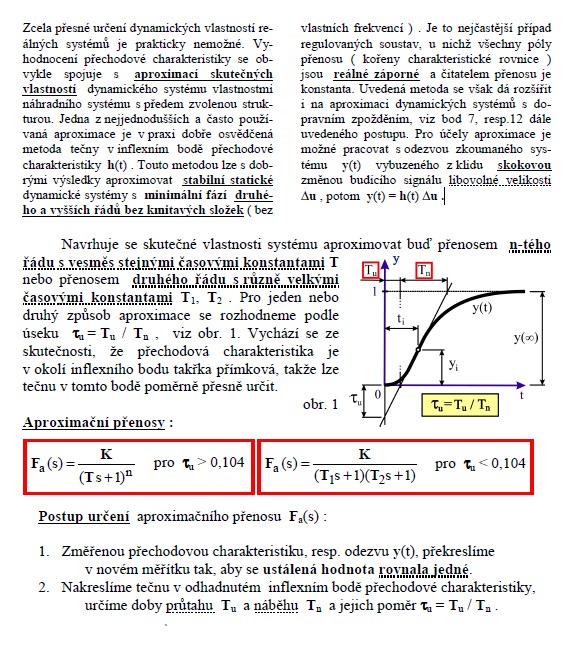
Zcela přesné určení dynamických vlastností reálných systémů je prakticky nemožné. Vyhodnocení přechodové charakteristiky se obvykle spojuje s aproximací skutečných vlastností dynamického systému vlastnostmi náhradního systému s předem zvolenou strukturou. Jedna z nejjednodušších a často používaná aproximace je v praxi dobře osvědčená metoda tečny v inflexním bodě přechodové charakteristiky h(t) . Touto metodou lze s dobrými výsledky aproximovat stabilní statické dynamické systémy s minimální fází druhého a vyšších řádů bez kmitavých složek ( bez vlastních frekvencí ) . Je to nejčastější případ regulovaných soustav, u nichž všechny póly přenosu ( kořeny charakteristické rovnice ) jsou reálné záporné a čitatelem přenosu je konstanta. Uvedená metoda se však dá rozšířit i na aproximaci dynamických systémů s dopravním zpožděním, viz bod 7, resp.12 dále uvedeného postupu. Pro účely aproximace je možné pracovat s odezvou zkoumaného systému y t) vybuzeného z klidu skokovou změnou budicího signálu libovolné velikosti Δu , potom y(t) = h(t) Δu .