Studijní materiál: Identifikace regulované soustavy Strejcovou metodou
Skrýt detaily | Oblíbený- Kvalita:83,2 %
- Typ:Studijní materiál
- Univerzita:Univerzita Tomáše Bati ve Zlíně
- Fakulta:Fakulta aplikované informatiky
- Kategorie:Technika
- Podkategorie:Automatizace
- Předmět:Automatizace
- Autor:snoopydogg
- Ročník:2. ročník
- Rozsah A4:10 strán
- Zobrazeno:1 414 x
- Stažené:1 x
- Velikost:0,5 MB
- Formát a přípona:MS Office Word (.doc)
- Jazyk:český
- ID projektu:12434
- Poslední úprava:01.08.2018
Postup při měření:
1. Zapojte regulační obvod s reálnou tepelnou soustavou a seznamte se s monitorovacím a řídicím programovým systémem „WCONTROL“.
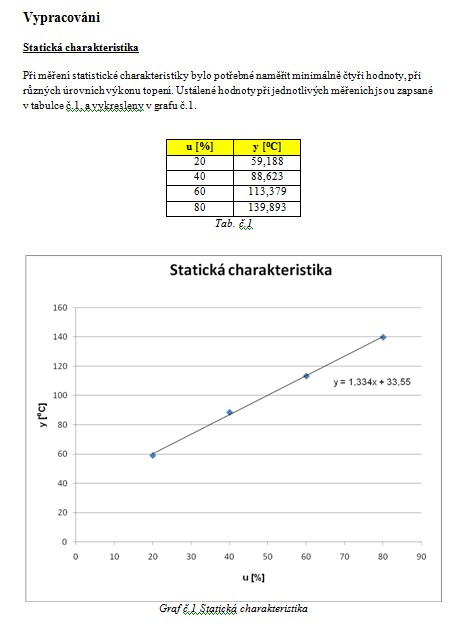
2. Změřte statickou charakteristiku regulované soustavy tak, že na vstup soustavy postupně přivedete 4 různé úrovně (např. 25%, 50%, 70%, 90% maximální hodnoty) vstupní veličiny.
- Vykreslete statickou charakteristiku (graficky i tabulkou), její závislost vyjádřete (aproximujte) lineární rovnicí, a odhadněte pásmo, ve kterém je systém lineární.
3.Změřte alespoň dvakrát přechodovou charakteristiku regulované soustavy při změně akční veličiny o 15-20%, přičemž rozsah volte v lineární oblasti statické charakteristiky. Přechodové charakteristiky archivujte s vhodnou periodou.
- Vykreslete jednotlivé naměřené průběhy dynamických odezev a přechodové charakteristiky (dle definice přechodové funkce) soustavy.
- Naměřené pořadnice bodů charakteristik zprůměrujte a vykreslete výslednou přechodovou charakteristiku.
- Z této výsledné přechodové charakteristiky určete parametry regulované soustavy pomocí Strejcovy metody s použitím modelu druhého řádu bez dopravního zpoždění. Označte polohu inflexního bodu. Určete fyzikální jednotky identifikovaných parametrů.
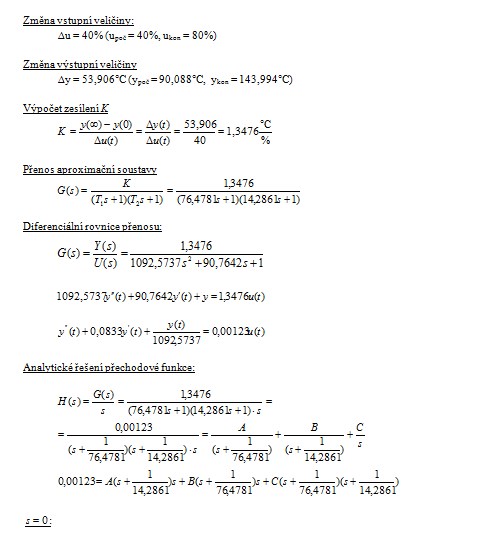
- Ze získaného spojitého přenosu GS(s) určete diferenciální rovnici a analyticky (s pomocí Laplaceovy transformace) vypočtěte přechodovou funkci modelu.
- V jednom grafu společně zobrazte přechodovou charakteristiku naměřenou, přechodovou charakteristiku získanou z identifikovaného modelu pomocí programu MATLAB/SIMULINK a přechodovou charakteristiku vypočtenou z modelu analyticky.
4. V závěru výsledky práce podrobně zhodnoťte.
1. Zapojte regulační obvod s reálnou tepelnou soustavou a seznamte se s monitorovacím a řídicím programovým systémem „WCONTROL“.
2. Změřte statickou charakteristiku regulované soustavy tak, že na vstup soustavy postupně přivedete 4 různé úrovně (např. 25%, 50%, 70%, 90% maximální hodnoty) vstupní veličiny.
- Vykreslete statickou charakteristiku (graficky i tabulkou), její závislost vyjádřete (aproximujte) lineární rovnicí, a odhadněte pásmo, ve kterém je systém lineární.
3.Změřte alespoň dvakrát přechodovou charakteristiku regulované soustavy při změně akční veličiny o 15-20%, přičemž rozsah volte v lineární oblasti statické charakteristiky. Přechodové charakteristiky archivujte s vhodnou periodou.
- Vykreslete jednotlivé naměřené průběhy dynamických odezev a přechodové charakteristiky (dle definice přechodové funkce) soustavy.
- Naměřené pořadnice bodů charakteristik zprůměrujte a vykreslete výslednou přechodovou charakteristiku.
- Z této výsledné přechodové charakteristiky určete parametry regulované soustavy pomocí Strejcovy metody s použitím modelu druhého řádu bez dopravního zpoždění. Označte polohu inflexního bodu. Určete fyzikální jednotky identifikovaných parametrů.
- Ze získaného spojitého přenosu GS(s) určete diferenciální rovnici a analyticky (s pomocí Laplaceovy transformace) vypočtěte přechodovou funkci modelu.
- V jednom grafu společně zobrazte přechodovou charakteristiku naměřenou, přechodovou charakteristiku získanou z identifikovaného modelu pomocí programu MATLAB/SIMULINK a přechodovou charakteristiku vypočtenou z modelu analyticky.
4. V závěru výsledky práce podrobně zhodnoťte.