Studijní materiál: Dvoupolohová regulace a identifikace soustavy z mezních kmitů
Skrýt detaily | Oblíbený- Kvalita:88,2 %
- Typ:Studijní materiál
- Univerzita:Univerzita Tomáše Bati ve Zlíně
- Fakulta:Fakulta aplikované informatiky
- Kategorie:Technika
- Podkategorie:Automatizace
- Předmět:Automatizace
- Autor:snoopydogg
- Ročník:2. ročník
- Rozsah A4:7 strán
- Zobrazeno:1 644 x
- Stažené:1 x
- Velikost:0,4 MB
- Formát a přípona:MS Office Word (.docx)
- Jazyk:český
- ID projektu:12436
- Poslední úprava:01.08.2018
1)
- Zapojte regulační obvod s reálnou tepelnou soustavou a monitorovacím a řídicím programovým systémem „WCONTROL“.
2)
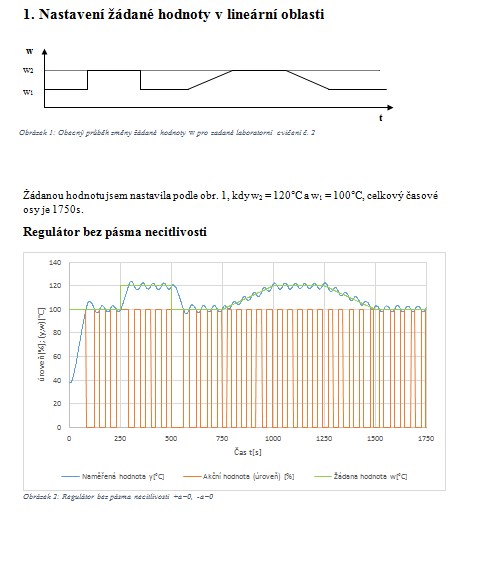
- Nastavte průběh žádané hodnoty v lineární oblasti podle obrázku uvedeného vyučujícím, aby byl rozdíl w2-w1 max. 20°C, a časovou osu volte tak, aby se odezva vždy dostatečně přiblížila konstantní hodnotě (na základě výsledků Úkolu č. 1).
- Ověřte na tepelné soustavě regulaci pro následující nastavení dvoupolohového regulátoru:
a) regulátor bez pásma necitlivosti
b) regulátor s pásmem necitlivosti v rozmezí 2-5% rozsahu převodníku
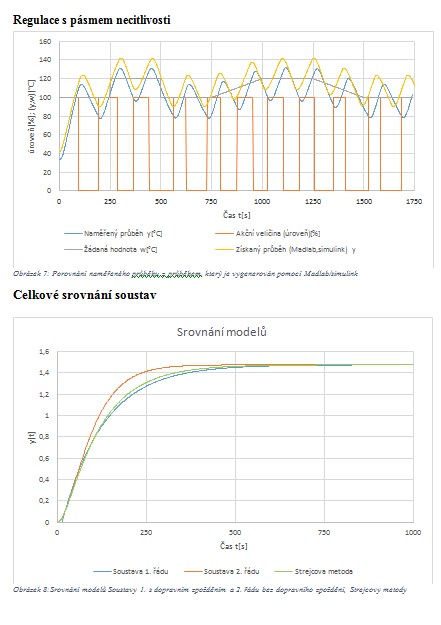
- Zobrazte a vyhodnoťte oba regulační pochody a srovnejte je se simulacemi v programu MATLAB/SIMULINK. Vykreslete průběh akční i výstupní veličiny.
2)
- Libovolnou metodou vypočítejte nastavení PI(D) regulátoru pro model identifikovaný Strejcovou metodou a simulačně srovnejte regulační pochod s tímto regulátorem s výsledky z bodu 2.
3)
- S využitím výsledku z bodu 2a aproximujte přenos soustavy, přičemž použijte model proporcionální soustavy prvního řádu s dopravním zpožděním a model proporcionální soustavy druhého řádu bez dopravního zpoždění. Pro identifikaci použijte znalosti kritického zesílení a kritické periody kmitů.
4)
- Identifikované modely graficky (v jediném grafu) srovnejte s modelem získaným v Úkolu č. 1 (tj. Strejcovou metodou) a s naměřenou (reálnou) přechodovou charakteristikou z Úlohy č. 1 (v jediném grafu).
5)
- V závěru výsledky práce podrobně zhodnoťte.
- Zapojte regulační obvod s reálnou tepelnou soustavou a monitorovacím a řídicím programovým systémem „WCONTROL“.
2)
- Nastavte průběh žádané hodnoty v lineární oblasti podle obrázku uvedeného vyučujícím, aby byl rozdíl w2-w1 max. 20°C, a časovou osu volte tak, aby se odezva vždy dostatečně přiblížila konstantní hodnotě (na základě výsledků Úkolu č. 1).
- Ověřte na tepelné soustavě regulaci pro následující nastavení dvoupolohového regulátoru:
a) regulátor bez pásma necitlivosti
b) regulátor s pásmem necitlivosti v rozmezí 2-5% rozsahu převodníku
- Zobrazte a vyhodnoťte oba regulační pochody a srovnejte je se simulacemi v programu MATLAB/SIMULINK. Vykreslete průběh akční i výstupní veličiny.
2)
- Libovolnou metodou vypočítejte nastavení PI(D) regulátoru pro model identifikovaný Strejcovou metodou a simulačně srovnejte regulační pochod s tímto regulátorem s výsledky z bodu 2.
3)
- S využitím výsledku z bodu 2a aproximujte přenos soustavy, přičemž použijte model proporcionální soustavy prvního řádu s dopravním zpožděním a model proporcionální soustavy druhého řádu bez dopravního zpoždění. Pro identifikaci použijte znalosti kritického zesílení a kritické periody kmitů.
4)
- Identifikované modely graficky (v jediném grafu) srovnejte s modelem získaným v Úkolu č. 1 (tj. Strejcovou metodou) a s naměřenou (reálnou) přechodovou charakteristikou z Úlohy č. 1 (v jediném grafu).
5)
- V závěru výsledky práce podrobně zhodnoťte.