Poznámky: Mechanika tuhého tělesa
Skrýt detaily | Oblíbený- Kvalita:70,8 %
- Typ:Poznámky
- Univerzita:Vysoká škola báňská - Technická univerzita Ostrava
- Fakulta:Fakulta stavební
- Kategorie:Přírodní vědy
- Podkategorie:Fyzika
- Předmět:Fyzika
- Autor:josef.trousil
- Rozsah A4:5 strán
- Zobrazeno:1 696 x
- Stažené:0 x
- Velikost:0,1 MB
- Formát a přípona:MS Office Word (.doc)
- Jazyk:český
- ID projektu:3204
- Poslední úprava:28.04.2014
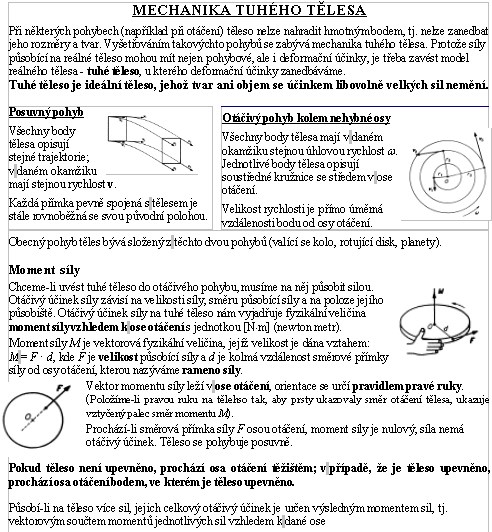
Při některých pohybech (například při otáčení) těleso nelze nahradit hmotným bodem, tj. nelze zanedbat jeho rozměry a tvar. Vyšetřováním takovýchto pohybů se zabývá mechanika tuhého tělesa. Protože síly působící na reálné těleso mohou mít nejen pohybové, ale i deformační účinky, je třeba zavést model reálného tělesa - tuhé těleso, u kterého deformační účinky zanedbáváme.
Tuhé těleso je ideální těleso, jehož tvar ani objem se účinkem libovolně velkých sil nemění.
Posuvný pohyb
Všechny body tělesa opisují stejné trajektorie; v daném okamžiku mají stejnou rychlost v.
Každá přímka pevně spojená s tělesem je stále rovnoběžná se svou původní polohou.
Otáčivý pohyb kolem nehybné osy
Všechny body tělesa mají v daném okamžiku stejnou úhlovou rychlost w. Jednotlivé body tělesa opisují soustředné kružnice se středem v ose otáčení.
Velikost rychlosti je přímo úměrná vzdálenosti bodu od osy otáčení.
Obecný pohyb těles bývá složený z těchto dvou pohybů (valící se kolo, rotující disk, planety).
Moment síly
Chceme-li uvést tuhé těleso do otáčivého pohybu, musíme na něj působit silou. Otáčivý účinek síly závisí na velikosti síly, směru působící síly a na poloze jejího působiště. Otáčivý účinek síly na tuhé těleso nám vyjadřuje fyzikální veličina moment síly vzhledem k ose otáčení s jednotkou [N×m] (newton metr).
Moment síly M je vektorová fyzikální veličina, jejíž velikost je dána vztahem: M = F · d, kde F je velikost působící síly a d je kolmá vzdálenost směrové přímky síly od osy otáčení, kterou nazýváme rameno síly.
Vektor momentu síly leží v ose otáčení, orientace se určí pravidlem pravé ruky.
(Položíme-li pravou ruku na těleso tak, aby prsty ukazovaly směr otáčení tělesa, ukazuje vztyčený palec směr momentu M).
Prochází-li směrová přímka síly F osou otáčení, moment síly je nulový, síla nemá otáčivý účinek. Těleso se pohybuje posuvně.
Tuhé těleso je ideální těleso, jehož tvar ani objem se účinkem libovolně velkých sil nemění.
Posuvný pohyb
Všechny body tělesa opisují stejné trajektorie; v daném okamžiku mají stejnou rychlost v.
Každá přímka pevně spojená s tělesem je stále rovnoběžná se svou původní polohou.
Otáčivý pohyb kolem nehybné osy
Všechny body tělesa mají v daném okamžiku stejnou úhlovou rychlost w. Jednotlivé body tělesa opisují soustředné kružnice se středem v ose otáčení.
Velikost rychlosti je přímo úměrná vzdálenosti bodu od osy otáčení.
Obecný pohyb těles bývá složený z těchto dvou pohybů (valící se kolo, rotující disk, planety).
Moment síly
Chceme-li uvést tuhé těleso do otáčivého pohybu, musíme na něj působit silou. Otáčivý účinek síly závisí na velikosti síly, směru působící síly a na poloze jejího působiště. Otáčivý účinek síly na tuhé těleso nám vyjadřuje fyzikální veličina moment síly vzhledem k ose otáčení s jednotkou [N×m] (newton metr).
Moment síly M je vektorová fyzikální veličina, jejíž velikost je dána vztahem: M = F · d, kde F je velikost působící síly a d je kolmá vzdálenost směrové přímky síly od osy otáčení, kterou nazýváme rameno síly.
Vektor momentu síly leží v ose otáčení, orientace se určí pravidlem pravé ruky.
(Položíme-li pravou ruku na těleso tak, aby prsty ukazovaly směr otáčení tělesa, ukazuje vztyčený palec směr momentu M).
Prochází-li směrová přímka síly F osou otáčení, moment síly je nulový, síla nemá otáčivý účinek. Těleso se pohybuje posuvně.