Skripta: Řešené příklady z mechaniky, kmitů a vln
Skrýt detaily | Oblíbený- Kvalita:86,1 %
- Typ:Skripta
- Univerzita:Vysoké učení technické v Brně
- Fakulta:Fakulta informačních technologií
- Kategorie:Přírodní vědy
- Podkategorie:Fyzika
- Předmět:Fyzika
- Autor:eliskabila
- Ročník:1. ročník
- Rozsah A4:19 strán
- Zobrazeno:1 537 x
- Stažené:0 x
- Velikost:0,3 MB
- Formát a přípona:PDF dokument (.pdf)
- Jazyk:český
- ID projektu:4020
- Poslední úprava:22.08.2014
1 Řešené příklady
1.1 Řešené příklady z kinematiky
Příklad 1.1.1
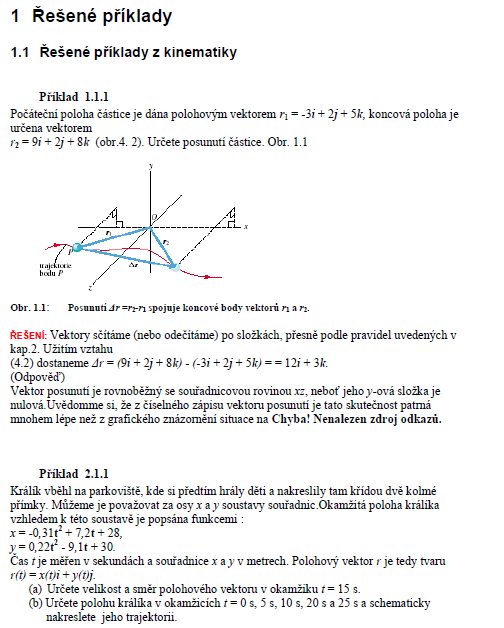
Počáteční poloha částice je dána polohovým vektorem r1 = -3i + 2j + 5k, koncová poloha je určena vektorem r2 = 9i + 2j + 8k (obr.4. 2). Určete posunutí částice. Obr. 1.1
Obr. 1.1: Posunutí Δr =r2-r1 spojuje koncové body vektorů r1 a r2.
ŘEŠENÍ: Vektory sčítáme (nebo odečítáme) po složkách, přesně podle pravidel uvedených v kap.2. Užitím vztahu (4.2) dostaneme Δr = (9i + 2j + 8k) - (-3i + 2j + 5k) = = 12i + 3k.
(Odpověď)
Vektor posunutí je rovnoběžný se souřadnicovou rovinou xz, neboť jeho y-ová složka je nulová.Uvědomme si, že z číselného zápisu vektoru posunutí je tato skutečnost patrná mnohem lépe než z grafického znázornění situace na Chyba! Nenalezen zdroj odkazů.
Příklad 2.1.1
Králík vběhl na parkoviště, kde si předtím hrály děti a nakreslily tam křídou dvě kolmé přímky. Můžeme je považovat za osy x a y soustavy souřadnic.Okamžitá poloha králíka vzhledem k této soustavě je popsána funkcemi :
x = -0,31t2 + 7,2t + 28,
y = 0,22t2 - 9,1t + 30.
Čas t je měřen v sekundách a souřadnice x a y v metrech. Polohový vektor r je tedy tvaru r(t) = x(t)i + y(t)j.
(a) Určete velikost a směr polohového vektoru v okamžiku t = 15 s.
(b) Určete polohu králíka v okamžicích t = 0 s, 5 s, 10 s, 20 s a 25 s a schematicky nakreslete jeho trajektorii.
1.1 Řešené příklady z kinematiky
Příklad 1.1.1
Počáteční poloha částice je dána polohovým vektorem r1 = -3i + 2j + 5k, koncová poloha je určena vektorem r2 = 9i + 2j + 8k (obr.4. 2). Určete posunutí částice. Obr. 1.1
Obr. 1.1: Posunutí Δr =r2-r1 spojuje koncové body vektorů r1 a r2.
ŘEŠENÍ: Vektory sčítáme (nebo odečítáme) po složkách, přesně podle pravidel uvedených v kap.2. Užitím vztahu (4.2) dostaneme Δr = (9i + 2j + 8k) - (-3i + 2j + 5k) = = 12i + 3k.
(Odpověď)
Vektor posunutí je rovnoběžný se souřadnicovou rovinou xz, neboť jeho y-ová složka je nulová.Uvědomme si, že z číselného zápisu vektoru posunutí je tato skutečnost patrná mnohem lépe než z grafického znázornění situace na Chyba! Nenalezen zdroj odkazů.
Příklad 2.1.1
Králík vběhl na parkoviště, kde si předtím hrály děti a nakreslily tam křídou dvě kolmé přímky. Můžeme je považovat za osy x a y soustavy souřadnic.Okamžitá poloha králíka vzhledem k této soustavě je popsána funkcemi :
x = -0,31t2 + 7,2t + 28,
y = 0,22t2 - 9,1t + 30.
Čas t je měřen v sekundách a souřadnice x a y v metrech. Polohový vektor r je tedy tvaru r(t) = x(t)i + y(t)j.
(a) Určete velikost a směr polohového vektoru v okamžiku t = 15 s.
(b) Určete polohu králíka v okamžicích t = 0 s, 5 s, 10 s, 20 s a 25 s a schematicky nakreslete jeho trajektorii.