Bakalářská práce: Návrh robotické buňky pro automatickou manipulaci - expedici pivních sudů a přepravek - Robotic cell design for automated manipulation -Expedition of beer barrels and bottle crates
Skrýt detaily | Oblíbený- Kvalita:92,3 %
- Typ:Bakalářská práce
- Univerzita:Vysoké učení technické v Brně
- Fakulta:Fakulta strojního inženýrství
- Kategorie:Technika
- Podkategorie:Strojírenství
- Autor:modrehory
- Ročník:3. ročník
- Rozsah A4:32 strán
- Zobrazeno:1 816 x
- Stažené:1 x
- Velikost:3,7 MB
- Formát a přípona:PDF dokument (.pdf)
- Jazyk:český
- ID projektu:4131
- Poslední úprava:10.09.2014
ÚVOD
Tato práce se věnuje návrhu plně automatizovaného, bezobslužného pracoviště ve formě expediční linky s koncepcí malého pivovaru zaměřené na činnost expedičního robota a provozu kolem něj.
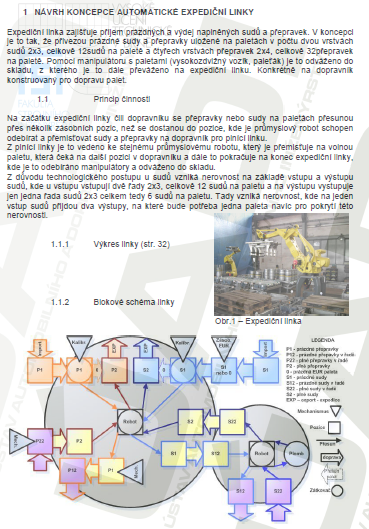
V automatizované lince jsou použity různé typy dopravníků pro přepravu palet, pivních sudů a přepravek od jejich začátku, aţ po expedici. Expedici zajišťuje kompletně automatizovaná linka se dvěma průmyslovými roboty, kteří dělají spojku mezi plnící a expediční linkou. Linka je převážně zajištěna optickými senzory pro detekci polohy (palet, sudů, přepravek) a indukčními senzory pro detekci ostatních mechanismů. Pro celkovou orientaci poslouží blokové schéma a výkres linky.
Dále se věnuje navržením vhodného typu průmyslového robota, který musí zajišťovat přepravu mezi plnící a expediční linkou. Budou na něj kladeny požadavky ze strany manipulačních možností, pracovního dosahu a zdvihu, rychlosti práce a nosnosti pro maximální teoretickou zátěž, kterou robot bude přenášet.
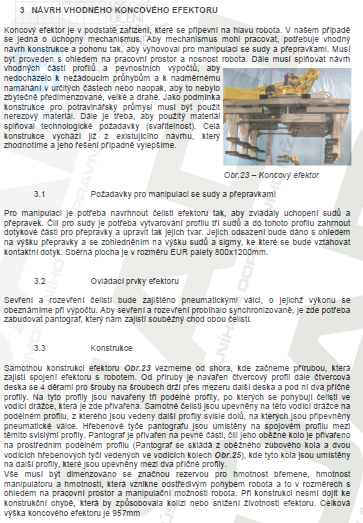
Dále se věnuje navržením vhodného typu koncového efektoru pro požadované operace se sudy a přepravkami. To bude obnášet kompletní návrh konstrukce úchopného systému, jeho dotykové části, pohonu a výpočty vhodných sil zabezpečující pevné uchopení.
Dalším bodem bude nevrhnout vhodnou koncepci řízení linky. Zde budou zahrnuty veškeré snímače a senzory zabezpečující plynulý a bezproblémový chod linky přes spínače, sekce vstupu a výstupu, Profibus, řídící systém robota a to vše bude řízeno programovatelným automatem PLC.
V konečné fázi se budeme zabývat bezpečností. Spolehlivostí chodu linky a použitými bezpečnostními prvky pro zabezpečení celého pracoviště.
Tato práce se věnuje návrhu plně automatizovaného, bezobslužného pracoviště ve formě expediční linky s koncepcí malého pivovaru zaměřené na činnost expedičního robota a provozu kolem něj.
V automatizované lince jsou použity různé typy dopravníků pro přepravu palet, pivních sudů a přepravek od jejich začátku, aţ po expedici. Expedici zajišťuje kompletně automatizovaná linka se dvěma průmyslovými roboty, kteří dělají spojku mezi plnící a expediční linkou. Linka je převážně zajištěna optickými senzory pro detekci polohy (palet, sudů, přepravek) a indukčními senzory pro detekci ostatních mechanismů. Pro celkovou orientaci poslouží blokové schéma a výkres linky.
Dále se věnuje navržením vhodného typu průmyslového robota, který musí zajišťovat přepravu mezi plnící a expediční linkou. Budou na něj kladeny požadavky ze strany manipulačních možností, pracovního dosahu a zdvihu, rychlosti práce a nosnosti pro maximální teoretickou zátěž, kterou robot bude přenášet.
Dále se věnuje navržením vhodného typu koncového efektoru pro požadované operace se sudy a přepravkami. To bude obnášet kompletní návrh konstrukce úchopného systému, jeho dotykové části, pohonu a výpočty vhodných sil zabezpečující pevné uchopení.
Dalším bodem bude nevrhnout vhodnou koncepci řízení linky. Zde budou zahrnuty veškeré snímače a senzory zabezpečující plynulý a bezproblémový chod linky přes spínače, sekce vstupu a výstupu, Profibus, řídící systém robota a to vše bude řízeno programovatelným automatem PLC.
V konečné fázi se budeme zabývat bezpečností. Spolehlivostí chodu linky a použitými bezpečnostními prvky pro zabezpečení celého pracoviště.