Studijní materiál: Diskretizace spojitých systemů, vzájemné převody mezi spojitými a diskrétními systémy
Skrýt detaily | Oblíbený- Kvalita:73,7 %
- Typ:Studijní materiál
- Univerzita:Vysoké učení technické v Brně
- Fakulta:Fakulta elektrotechniky a komunikačních technologií
- Kategorie:Technika
- Podkategorie:Elektrotechnika
- Autor:goldenlife
- Ročník:3. ročník
- Rozsah A4:7 strán
- Zobrazeno:916 x
- Stažené:1 x
- Velikost:0,5 MB
- Formát a přípona:MS Office Word (.docx)
- Jazyk:český
- ID projektu:9267
- Poslední úprava:19.12.2016
V technické praxi nejčastěji pracujeme se spojitými soustavami, neboť většina fyzikálních veličin, které řídíme či regulujeme, má spojitý charakter (teplota, tlak, rychlost, poloha,…) .
Prakticky všechny moderní řídicí systémy jsou založené na digitální technice používající procesor nebo mikroprocesor, tedy technickou komponentu zpracovávající informace diskrétně - s krokem.
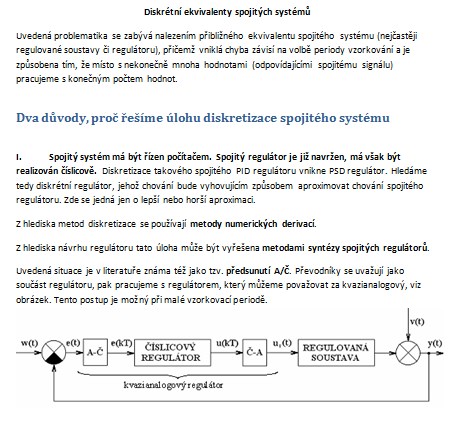
Nejčastější případ je takový, že regulujeme spojitou soustavu, ale chceme použít diskrétní regulátor.
Základní výhodou je to, že výpočet akčního zásahu je nesrovnatelně jednodušší a rychlejší než u spojitého regulátoru.
Prakticky všechny moderní řídicí systémy jsou založené na digitální technice používající procesor nebo mikroprocesor, tedy technickou komponentu zpracovávající informace diskrétně - s krokem.
Nejčastější případ je takový, že regulujeme spojitou soustavu, ale chceme použít diskrétní regulátor.
Základní výhodou je to, že výpočet akčního zásahu je nesrovnatelně jednodušší a rychlejší než u spojitého regulátoru.