Státnicové otázky: Měřicí a řídicí technika - Regulační systémy
Skrýt detaily | Oblíbený- Kvalita:91,4 %
- Typ:Státnicové otázky
- Univerzita:Vysoká škola báňská - Technická univerzita Ostrava
- Fakulta:Fakulta elektrotechniky a informatiky
- Kategorie:Technika
- Podkategorie:Kybernetika
- Předmět:Měřicí a řídicí technika
- Autor:goldenlife
- Ročník:5. ročník
- Rozsah A4:93 strán
- Zobrazeno:1 945 x
- Stažené:0 x
- Velikost:8,6 MB
- Formát a přípona:MS Office Word (.doc)
- Jazyk:český
- ID projektu:9277
- Poslední úprava:19.12.2016
1 Popis lineárních spojitých a diskrétních zpětnovazebních řídicích systémů
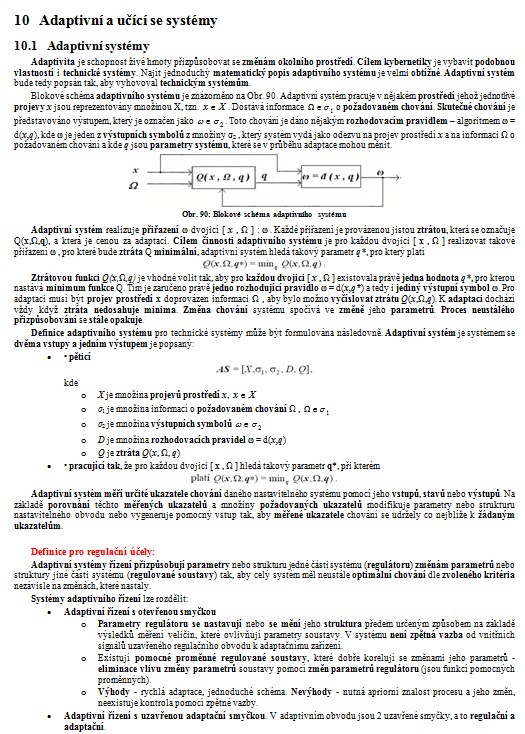
Popis lineárních spojitých a diskrétních zpětnovazebních řídicích systémů. Vnější a vnitřní popis, statické a dynamické vlastnosti.
1.1 Vnější popis spojitých dynamických systémů
Dynamické vlastnosti spojitých systémů lze popsat buď v časové nebo frekvenční oblasti následujícími způsoby:
a) diferenciální rovnicí
b) operátorovým přenosem (Laplaceova transformace)
c) frekvenčním přenosem (Fourierova transformace)
d) frekvenční charakteristikou
e) impulsní charakteristikou
f) přechodovou charakteristikou
g) rozložením nul a pólů přenosu
ad a) diferenciální rovnicí
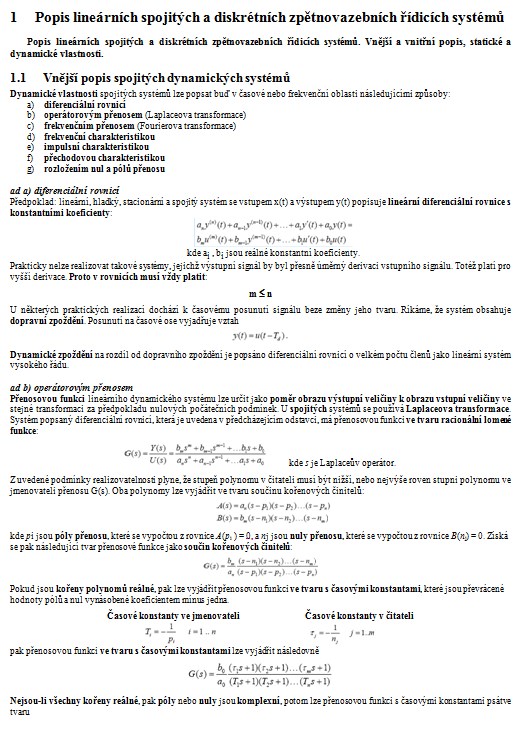
Předpoklad: lineární, hladký, stacionární a spojitý systém se vstupem x(t) a výstupem y(t) popisuje lineární diferenciální rovnice s konstantními koeficienty:
kde ai , bi jsou reálné konstantní koeficienty.
Prakticky nelze realizovat takové systémy, jejichž výstupní signál by byl přesně úměrný derivaci vstupního signálu. Totéž platí pro vyšší derivace. Proto v rovnicích musí vždy platit:
m < n
U některých praktických realizací dochází k časovému posunutí signálu beze změny jeho tvaru. Říkáme, že systém obsahuje dopravní zpoždění. Posunutí na časové ose vyjadřuje vztah
Dynamické zpoždění na rozdíl od dopravního zpoždění je popsáno diferenciální rovnicí o velkém počtu členů jako lineární systém vysokého řádu.
ad b) operátorovým přenosem
Přenosovou funkci lineárního dynamického systému lze určit jako poměr obrazu výstupní veličiny k obrazu vstupní veličiny ve stejné transformaci za předpokladu nulových počátečních podmínek. U spojitých systémů se používá Laplaceova transformace. Systém popsaný diferenciální rovnicí, která je uvedena v předcházejícím odstavci, má přenosovou funkci ve tvaru racionální lomené funkce:
Popis lineárních spojitých a diskrétních zpětnovazebních řídicích systémů. Vnější a vnitřní popis, statické a dynamické vlastnosti.
1.1 Vnější popis spojitých dynamických systémů
Dynamické vlastnosti spojitých systémů lze popsat buď v časové nebo frekvenční oblasti následujícími způsoby:
a) diferenciální rovnicí
b) operátorovým přenosem (Laplaceova transformace)
c) frekvenčním přenosem (Fourierova transformace)
d) frekvenční charakteristikou
e) impulsní charakteristikou
f) přechodovou charakteristikou
g) rozložením nul a pólů přenosu
ad a) diferenciální rovnicí
Předpoklad: lineární, hladký, stacionární a spojitý systém se vstupem x(t) a výstupem y(t) popisuje lineární diferenciální rovnice s konstantními koeficienty:
kde ai , bi jsou reálné konstantní koeficienty.
Prakticky nelze realizovat takové systémy, jejichž výstupní signál by byl přesně úměrný derivaci vstupního signálu. Totéž platí pro vyšší derivace. Proto v rovnicích musí vždy platit:
m < n
U některých praktických realizací dochází k časovému posunutí signálu beze změny jeho tvaru. Říkáme, že systém obsahuje dopravní zpoždění. Posunutí na časové ose vyjadřuje vztah
Dynamické zpoždění na rozdíl od dopravního zpoždění je popsáno diferenciální rovnicí o velkém počtu členů jako lineární systém vysokého řádu.
ad b) operátorovým přenosem
Přenosovou funkci lineárního dynamického systému lze určit jako poměr obrazu výstupní veličiny k obrazu vstupní veličiny ve stejné transformaci za předpokladu nulových počátečních podmínek. U spojitých systémů se používá Laplaceova transformace. Systém popsaný diferenciální rovnicí, která je uvedena v předcházejícím odstavci, má přenosovou funkci ve tvaru racionální lomené funkce: